Робототехнический
комплекс МАРКЕР
Совместный проект
НПО «Андроидная техника» и
Фонда перспективных исследований

Проект стартовал в марте 2018 года. Проработаны варианты робототехнических платформ, машины полностью скомпонованы, намечены все архитектурные решения по информационному обеспечению. Определены конструктивно-технические решения и характеристики. Проведена оценка объема экспериментальных исследований, предлагаемых для отработки в среде виртуального моделирования и анализ и обоснование выбора алгоритмов, используемых при создании функциональных систем, выполнено обоснование программно-аппаратной архитектуры. Обоснован состав и технические характеристики функциональных систем.

Функциональные особенности
Модульная робототехническая платформа, имеющая возможность реконфигурации не только по типу шасси: колесное или гусеничное, но и прежде всего по устанавливаемым модулям полезных нагрузок.
Модульное исполнение — создание интегрированных интеллектуальных систем разного назначения.
Автономное управление и обработка информации
Система группого управления РТП — формировние групп, навигация, планирование совместных тракторий и др.
Система технического зрения для обеспечения автономности; для обнаружения целей и других объектов
Ключевые технологии

Систем вооружения
- Технологии высокоскоростных приводов установок вооружения
- Технологии высокоточного избирательного поражения целей
- Технологии многоканального сопровождения и поражения целей
- Комплексирование наведения
- Технологии самоснаряжения бортового вооружения
- Технологии автоматической погрузки, доставки и выгрузки грузов

Технического зрения
- Технологии адаптивной реконфигурации системы сенсоров
- Технологии оперативного дообучения систем технического зрения
- Технология виртуализации условий применения РТК
- Технологии когнитивной среды функционирования
- Технологии решения задачи прицеливания в движении
- Технологии автоматической идентификации и сопровождения группы целей

Применения РТК
- Движение и маневрирование группы в условиях сложных препятствий
- Распознавание препятствий
- Реконструкция окружающего пространства в телевизионном формате
- Оценка возможности функционирования в задымлённых условиях
- Стрельба по особо малым скоростным целям
- Выборочное поражение целей
- Избирательное поражение целей
- Поражение бронетехники
- Поражение целей на дистанциях от 250 до 900м
- Транспортировка грузов в автоматизированном режиме
- Кассетный запуск боеприпасов
- Запуск ЛАОП

Конструирования РТК
- Технологии модульной компоновки элементов
- Технологии открытой архитектуры бортовых систем и аппаратной реконфигурации
- Технологии создания энергоэффективных гибридных силовых установок

Группового взаимодействия
- Технологии коллективного поведения РТК
- Технологии децентрализованного формирования построения группы РТП
- Технология интеллектуального управления группой РТК
- Технологии планирования групповых действий РТК в средах с препятствиями
- Технологии целераспределения между РТК

Человеко-машинного взаимодействия
- Технология создания маршрутного задания
- Технология создания полетного задания
- Технология обеспечения локальной ситуационной осведомленности оператора
- Технология обеспечения глобальной ситуационной осведомленности оператора
- Технология создания интерфейсов
- Технология интерфейсов управления РТП в дистанционном и супервизорном режиме
- Технология поддержки принятия решений
- Технология создания интерфейсов для использования операторами без специальной подготовки
- Технология снижения нагрузки на оператора при управлении РТК

Автономного движения
По ТЗ
- Автономное движение на скоростях до 60 км/ч на дорогах с твёрдым покрытием
- Автономное движение на скоростях до 45 км/ч по пересечённой местности
- Автономное движение в средах с препятствиями
Дополнительно
- Выполнение марш-броска 30 км и 100км
- Выполнение тестирования на узких дорогах космодрома с канавами глубиной до 5 м
- Выполнено тестирование на скоростях до 60 км/ч длительного автономного существования патрулирования населённого пункта
- Проведены испытания с объектами МО РФ

Развитие технологий
Задачи обеспечения безопасности, мониторинг/патрулирование/противодействие БпЛА
Автономное патрулирование газо — нефтепроводов в сложных природных и климатических условиях
Обслуживание аэродромов, включая автоматизированную диагностику и осмотр объектов
Проведение визуального мониторинга выполнения работ на объектах строительства
Транспортировка грузов
Вспомогательные задачи, например, очистка территории

Дополнительные технологии
Противодействие БЛА
- Уничтожение лазером
- Перехват средствами РЭБ
- Захват сетями
- Перехват каптёрами платформы «Маркер»
- Обнаружение и перехват оператора БЛА
Автономное передвижение
- Автономное патрулирование территории дороги, линии электропередач, проверка целостности
- Распознание автотранспорта и отдельных лиц во время движения
- Патрулирование сложнодоступных территорий
Человеко-машинный интерфейс и машинное зрение
- Распознание объектов, выявление артефактных явлений
- Распознание лиц, сравнение с базой данных
- Постоянное прослушивание речи, выявление коллизий
- Световое и звуковое воздействие на нарушителей
- Интерфейс взаимодействия с оперативными группами

Гусеничная платформа
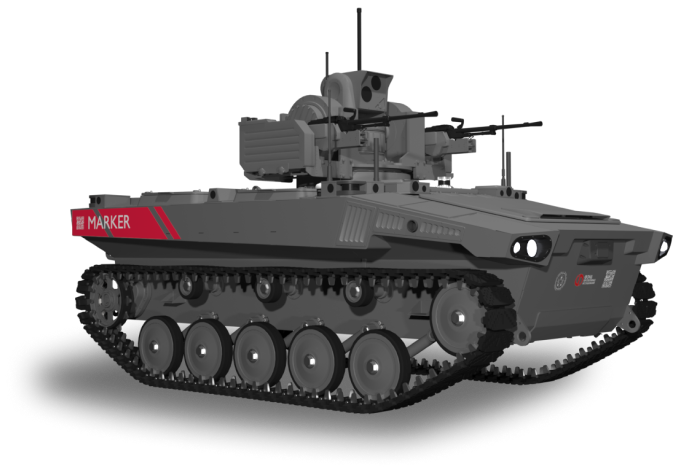
600 км
Запас хода
70 км/ч
Макс. скорость
3000 кг
Масса
33 кВт/ч
Емкость аккумуляторной
батареи
45 км/ч
Скорость движения по
пересеченной местности
Колесная платформа

1000 км
Запас хода
80 км/ч
Макс. скорость
4500 кг
Масса
42,2 кВт/ч
Емкость аккумуляторной
батареи
60 км/ч
Скорость движения по
пересеченной местности